
MIT开发新算法让自动驾驶汽车像真人司机一样变道
自主车辆不像人们那样知道如何变换车道。它们倾向于依赖相对静态的数据模型,这种数据模型在交通交通拥挤的地区比较难应付,或者自动驾驶汽车只有在满足必须变换车道的绝对条件...
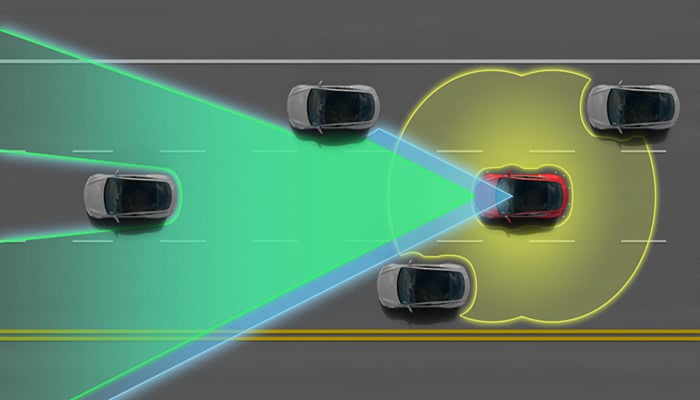
自主车辆不像人们那样知道如何变换车道。它们倾向于依赖相对静态的数据模型,这种数据模型在交通交通拥挤的地区比较难应付,或者自动驾驶汽车只有在满足必须变换车道的绝对条件下才会变道,但是现实几乎不可能。 MIT正在开发一种新算法,让汽车在遵守道路安全的同时更像人类司机一样变换车道。

这项新技术是对我们熟悉的“缓冲区”概念的一种改进,它可以确定其他车辆正在行驶的位置,以及无人驾驶车辆如何避免发生碰撞。早期的系统提前计算这些区域以节省时间,但MIT使用“数学高效”的方法,如果性能远低于人类驾驶员,则会在现场创建新缓冲区域。 这个过程的速度有所偏差,甚至可以根据危险级别进行定制,但是至少可以让你在必须便道的时候有个“安全保障”。
目前还只是一种算法,还需要很长时间才能上路应用。不过,丰田与海军研究办公室共同支持该项目,这表明进入现实世界服务只是时间问题。这可能比最初看起来更重要,如果自动驾驶汽车与人类共存,它们需要融入人的交通模式,这意味着更换车道的次数更多,即使只是为了避开慢车司机。

百度L4级自动驾驶汽车雄安路测开启
据悉,百度Apollo开放平台的3辆L4级别自动驾驶汽车在雄安市民服务中心园区展开了持续数日的昼夜真实道路测试。 目前,百度Apollo技术测试团队已进驻雄安展开全方位、多...

神州共享汽车怎么收费? 神州共享汽车需要押金吗?
神州租车是国内非常知名的租车公司,对于没有经济条件的朋友来说,租车是非常划算的。近2年伴随着共享单车的盛行和发展,如今共享汽车也得到了快速发展。近期神州租车公司终...

日产CES展示黑科技:用脑电波去控制汽车
1月9号在拉斯维加斯CES大会上,日产方面称,将会展示一项名为“Brain-to-Vehicle”的技术,其利用脑电波信号开控制汽车。
日产CES展示黑科技(图片来自cnbeta) ...
Drive.ai计划启动自动驾驶网约车服务
进入2018年来,对于自动驾驶汽车而言,坏消息总是要多于好消息。然而,根据外媒的报道,终于有一家在国内并不被人熟知的公司,计划在美国德克萨斯州Frisco的公共道路上,推出一种按照用...
BAT悉数入局自动驾驶,各方不希望错过这一市场
自动驾驶是当下最热门的新兴科技领域,这自然少不了国内三大互联网巨头,近期众多消息均显示着三家企业均已开始在自动驾驶领域展开布局,自动驾驶测试车开始上路测试。 据...

20年经验的汽车销售经理告诉你买车选高配还是低配?
其实这是一个仁者见仁的问题,有的朋友说:我是土豪,买车不差钱,直接入手顶配。这也没错,高配有高配的享受,但切合目前国人的购买力,大部分消费者还是重视买车经济性的,毕竟对于工...